Лекция -11.
Используемые способы управления в центре коммутации
План лекции
1. Общие понятия
2. Способы управления: централизованный, иерархический, децентрализованный, распределенный
3. Управляющее устройство
1.Общие понятия
Управляющие устройства УУ являются одним из основных видов оборудования любой АТС. Их общее назначение – управление процессом обслуживания потока поступающих вызовов с целью установления соединительных путей между входами и выходами КП станции и образование разговорного тракта. При обслуживании любого вызова УУ принимают информацию о требуемом соединении, обрабатывают её, осуществляют поиск свободных соединительных путей в КП и устанавливают соединение.
Существует много видов УУ. Это объясняется различными структурами КП АТС, различными конструкциями коммутационных приборов и другими факторами. Для каждого поколения АТС имеется свой вид УУ. Например, состав УУ электромеханических АТС зависит от способа управления (прямой или косвенный), и способов установления соединения (прямой или обходной). Развитие УУ шло по пути постепенного перехода от индивидуальных УУ к групповым (регистры, маркёры) и централизованному управлению Степень централизации зависит от быстродействия элементной базы УУ и их характеристик надёжности. Применение электронных элементов позволило достигнуть высокой степени централизации и создать программные способы управления обслуживанием вызовов.
2.Способы управления: централизованный, иерархический, децентрализованный, распределенный
Программное управление используется на цифровых АТС и предполагает наличие УУ и ЗУ. В ЗУ закладывается заранее заданная программа работы АТС, которая обеспечивает обслуживание вызовов по определённому алгоритму, не зависящему от абонента. Различают 2 способа программного управления:
- управление по замонтированной программе
- управление по записанной программе.
Наиболее широко применяется управление по записанной программе. В этом случае, программа работы АТС, которая представляет набор команд и определяет порядок обслуживания вызовов, вводится (записывается) в ЗУ управляющего оборудования и хранится в нём. При необходимости программа может быть легко заменена путём перезаписи программы. В качестве УУ используются специализированные ЭВМ, которые имеют различные названия у разных фирм-производителей коммутационного оборудования. В общем виде эти ЭВМ называют ЭУМ (электронно-управляющие машины) или процессорами. Достоинства их применения:
1. возможность создания универсального управляющего оборудования для АТС различного назначения (АМТС, ГТС, СТС, УТС)
2. гибкость в эксплуатации
3. предоставление абонентам большого числа различных ДВО программными средствами
4. организация программными средствами техобслуживания ТО (процессов контроля, диагностики и локализации неисправностей) всего оборудования АТС.
5. автоматизация сбора статистических данных о трафике, надёжности оборудования
6. возможность создания автоматизированной системы управления телекоммуникационной сетью (TMN), путём взаимодействия ЭУМ различных АТС сети.
Управляющие устройства по способу управления цифровой коммутацией можно разделить на 4 типа:
- централизованное
- иерархическое
- децентрализованное - распределённое
Архитектура централизованного управления показана на рис.11.1.
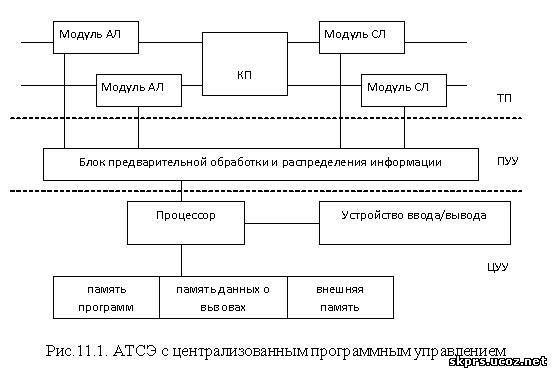
При централизованном программном управлении ЦУУ должен выполнять следующие функции:
1. управление обслуживанием вызова, включая анализ имеющихся в базе данных информации об абоненте А, приём цифр номера, контроль процесса обслуживания вызова во всех фазах.
2. управление коммутацией. Центральный процессор хранит отображение всех путей, находит и резервирует путь для запрашиваемого абонентским или линейным модулем соединения.
3. контроль, диагностика неисправностей и восстановление рабочей конфигурации системы Для выполнения этих функций ЦУУ должен обладать достаточной вычислительной мощностью. Недостатком централизованного управления является – низкая живучесть и гибкость. Выход из строя ЦУУ приводит к полной потере работоспособности в целом. Для повышения живучести и гибкости используют двухмашинные ЦУУ. Они могут работать в двух вариантах:
- синхронный режим
- режим разделения нагрузки
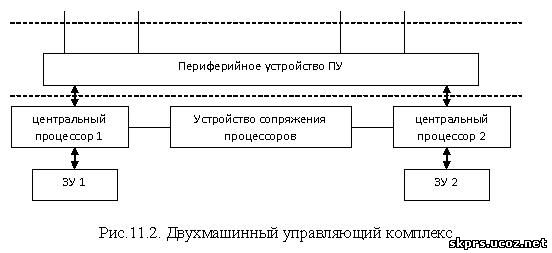
При синхронном режиме обе ЭУМ работают параллельно и выполняют все функции УУ. Одна из них является ведущей, другая ведомой. Ведущая ЭУМ может выдавать выработанную команду, а ведомая нет. Устройство сопряжения процессоров обеспечивает взаимный информационный обмен, при этом оба процессора имеют в своих ЗУ полную информацию о состоянии системы управления всей АТС.
В режиме разделения нагрузки нагрузка, поступающая к ЭУМ, делится на 2 половины. Одну половину обслуживает первая ЭУМ, вторую половину обслуживает вторая ЭУМ. При выходе из строя одной из ЭУМ исправная ЭУМ принимает на себя управление всей АТС.
Хотя двухмашинные ЦУУ повышают живучесть системы, но сохраняются другие недостатки:
- ограничение возможности расширения ёмкости УК. Необходимо установить сразу УУ с производительностью, достаточной для управления максимальной проектируемой ёмкостью станции.
- достаточно низкая эффективность использования вычислительных ресурсов ЦУУ и его технико-экономические показатели в период с момента установки до достижения им максимальной ёмкости.
Стремление получить линейную зависимость стоимости АТСЭ от её ёмкости в достаточно широком диапазоне ёмкостей и повысить живучесть УУ за счёт распределения функций управления и нагрузки между несколькими УУ привело к созданию децентрализованных УУ. Децентрализованное УУ состоит из нескольких УУ, каждое из которых выполняет только определённую часть функций и является равноправным с другими УУ (рис.9.3). 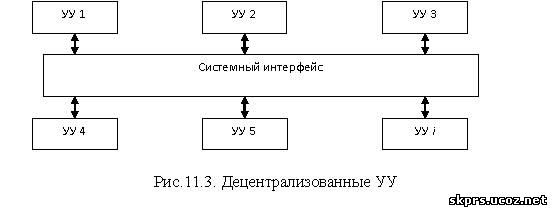
Отличительными чертами децентрализованных УУ является:
- управление процессом установления каждого соединения несколькими УУ
- отсутствиеединого координирующего совместную работу устройства ЦУУ
Недостатки – сложность организации и координации совместной работы. Например, трудности с рациональным распределением функций между УУ, обеспечивающим их равномерную загрузку.
Компромиссным вариантом построения управляющих систем является частичная децентрализация функций управления, осуществляемая в иерархическом управлении. Иерархическое управление состоит из центрального УУ и нескольких групп периферийных УУ (периферийных процессоров), находящихся между собой в иерархическом подчинении. Группа периферийных процессоров, непосредственно подключённая к периферийному интерфейсу, образует самый низкий уровень управления.
Центральное УУ образует самый высший уровень управления. УУ одного иерархического уровня не связаны между собой и работают независимо друг от друга. УУ соседних иерархических уровней имеют между собой информационные и функциональные связи через соответствующий системный интерфейс (рис.11.4)
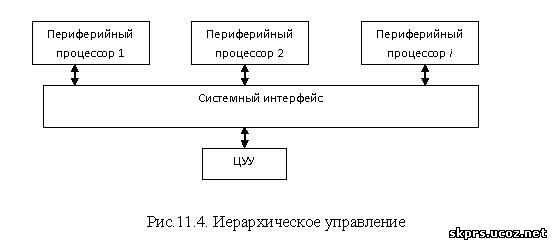
Периферийный процессоры берут на себя функции управления отдельными периферийными подсистемами АТС. Обычно периферийный процессоры представляют собой микропроцессорные устройства. Они сканируют линии, запрашивают информацию от центрального процессора и передают ему данные, нужные для обновления абонентской базы данных и для управления соединениями. Центральный процессор выполняет основные функции обработки вызовов и управления АТС в целом и несёт меньшую нагрузку по сравнению с ЦУУ централизованного управления. В результате увеличивается пропускная способность УУ.
Процесс управления на каждом этапе обслуживания вызова проходит через иерархические уровни, начиная с самого низкого до самого верхнего и обратно. Иерархическое управление имеет пирамидальную структуру, чем выше иерархический уровень, тем меньшее число УУ он содержит. Иерархическое управление сочетает в себе простоту и экономичность централизованных УУ с возможностью наращивания производительности и достаточно высокой живучести децентрализованных УУ. Недостаток – ограниченная масштабируемость управляющего комплекса по мере роста ёмкости АТС и зависимость восстановления системы в случае сбоя от ЦУУ.
Концепция распределённого программного управления предусматривает разбиение множества задач управления на несколько составных частей по принципу разделения функций (transaction sharing) или разделения нагрузки (load sharing). УУ распределяются по управляемым объектам и конструктивно объединяются, образуя функционально специализированные модули, из которых компонуются модули нужной ёмкости того или иного назначения. Все функции управления разделяются на специализированные наборы задач, содержащиеся в независимых процессорах и обеспечивающих в совокупности выполнение всех, связанных с управлением операций. Например, процессор абонентской ступени периодически сканирует, закреплённые за ним АЛ, отслеживает все возникающие на его ступени вызовы, поддерживает БД абонентов, ведёт наблюдение за каждым вызовом и проводит локальное восстановление и локальную диагностику своей схемы. Все процессоры общаются друг с другом путём обмена сообщениями через КП, общую шину и это является основой конструкции системы программного управления узлом коммутации.
3. Управляющее устройство
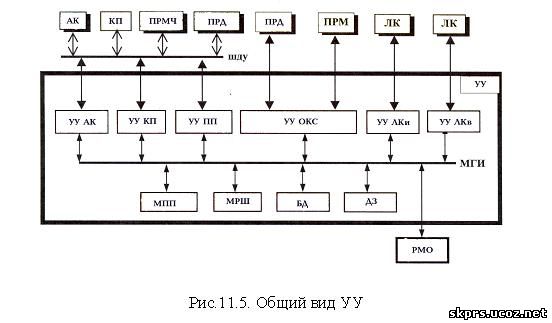
Управляющее устройство (УУ) АТСЭ представляет собой ряд подсистем, за которыми закреплены определенные функции. Эти подсистемы физически реализуются в виде микропроцессорного комплекса, либо в виде одной ЭВМ, в которой роль подсистем выполняют отдельные программы. В общем виде УУ изображено на рис.11.5 и содержит следующие подсистемы:
- управляющее устройство абонентских комплектов (УУ АК);
- управляющее устройство коммутационного поля (УУ КП);
- управляющее устройство частотных приемопередатчиков (УУ ПП);
- управляющее устройство общего канала сигнализации (УУ ОКС);
- управляющее устройство исходящих линейных комплектов (УУ ЛКи);
- управляющее устройство входящих линейных комплектов (УУ ЛКв);
- менеджер приемопередатчиков (МПП); маршрутизатор (МРШ);
- база данных (БД);
- диспетчер задач (ДЗ).
Взаимодействие подсистем УУ происходит через ДЗ, чтобы исключить одновременное занятие ресурсов разными подсистемами. Для этого каждой подсистеме присваивается свой приоритет, а процесс обмена сообщениями между подсистемами происходит следующим образом.
Подсистема А формирует сообщение к подсистеме В и вместе с номером своего приоритета отсылает его в буфер ДЗ, который выполняет пересылку сообщений адресату в порядке их поступления и с учетом приоритета. В дальнейшем под контекстом "...УУ АК обращается к МПП с запросом ... " или "...УУ АК отсылает поступившую цифру в МРШ... " следует понимать именно эту процедуру с участием ДЗ.
Функционирование АТСЦ начинается с того, что оператор станции через свое рабочее место (РМО) конфигурирует ее, задавая абонентскую и канальную емкость, способ обмена СУВ по пучкам каналов, наименование пунктов назначения, коды пунктов назначения и маршруты их достижения, тарифы и т.д. Все эти данные поступают на внутреннюю магистраль (МГИ) с адресацией к диспетчеру задач (ДЗ). ДЗ проверяет корректность и полноту поступающих данных и заносит их в базу данных (БД) для дальнейшего использования в процессе обслуживания вызовов. В процессе эксплуатации может потребоваться изменение БД, которое происходит точно также. Для понимания взаимодействия подсистем УУ рассмотрим процесс установления внутреннего соединения.
Контрольные вопросы
1.Для чего используется управление в цифровых АТС?
2.Для чего в цифровых АТС используется управляющее устройство?
3.Какие существуют способы управления ЦСК?
4.Какой способ управления ЦСК наиболее широко применяется? Почему?
5.Что такое ЭУМ?
6.Для каких целей используют двухмашинные ЦУУ?
7.АТСЭ каких фирм-производителей используют иерархическое управление?
8.АТСЭ каких фирм-производителей используют распределённое управление?
9.Какой принцип управления использует АТСЭ типа S12?
10. Какой принцип управления использует АТСЭ типа EWSD?
11. Какой принцип управления использует АТСЭ типа DTS3100?
12.Из каких подсистем состоит УУ цифровой АТС?
13. В виде чего реализуются подсистемы УУ цифровой АТС?
| 



